







Conseils de montage et de service
Les capteurs à ultrasons peuvent être montés et exploités dans n’importe quelle position. Nous conseillons toute- fois d’éviter les positions de montage qui favoriseraient un encrassement exagéré de la surface des capteurs. Des gouttes d'eau et des dépôts importants à la surface du transducteur peuvent nuire à son bon fonctionnement. Cependant, de petits dépôts de poussière et des éclaboussures de peinture n'influent pas sur leur fonctionnement.
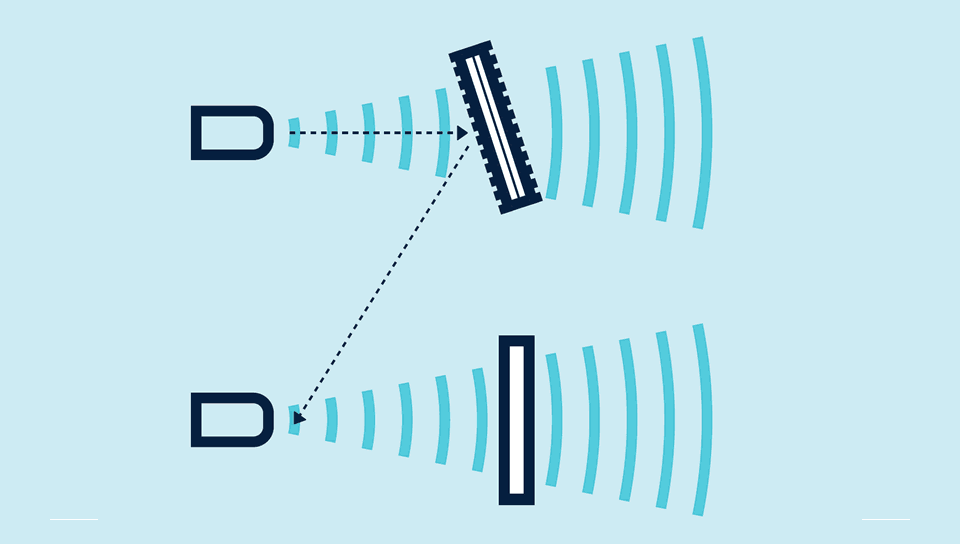
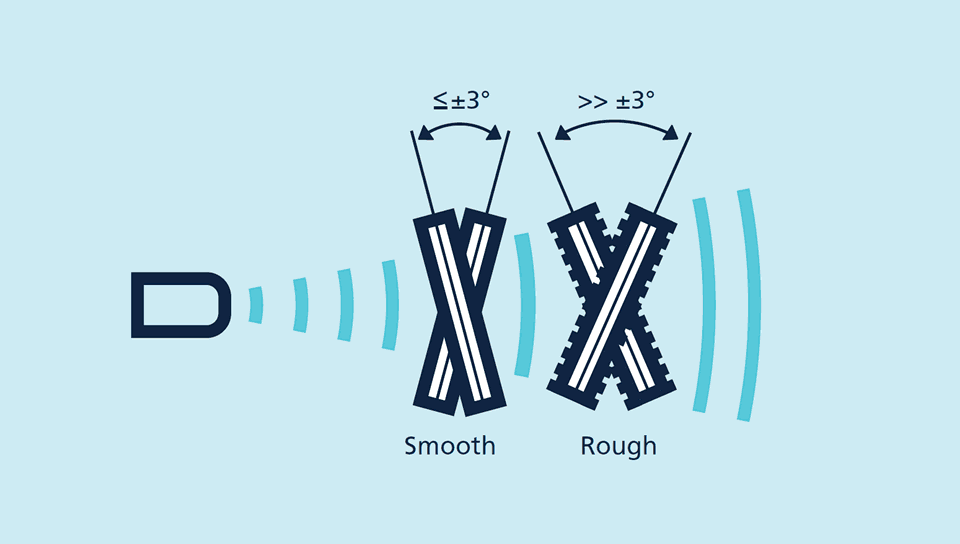
Si les objets à détecter ont une surface uniforme et lisse, les capteurs devront être installés avec un angle de 90° (± 3°) par rapport à la surface à scruter.
Par contre, les surfaces rugueuses permettent des divergences d’angle nettement plus grandes. Pour les ultrasons, une surface est rugueuse si sa profondeur de rugosité correspond à la longueur d’onde de la fréquence ultrasonore ou est plus importante.
En ultrasons, une surface est considérée comme rugueuse lorsque sa hauteur de crête à son creux est de l'ordre de grandeur de la longueur d'onde de la fréquence à ultrasons, ou plus est plus grande que celle-ci. Le son est ensuite réfléchi de manière dispersée et cela peut entraîner une réduction de la plage de fonctionnement. Dans le cas de surfaces rugueuses, l'écart angulaire maximal admissible et la plage de détection maximale doivent être déterminés par des essais. Les matériaux absorbant le son, par ex. Le coton ou les mousses tendres, peuvent réduire la plage de fonctionnement. D'autre part, les liquides et les matériaux solides sont de très bons réflecteurs du son.
Distances de montage et synchronisation
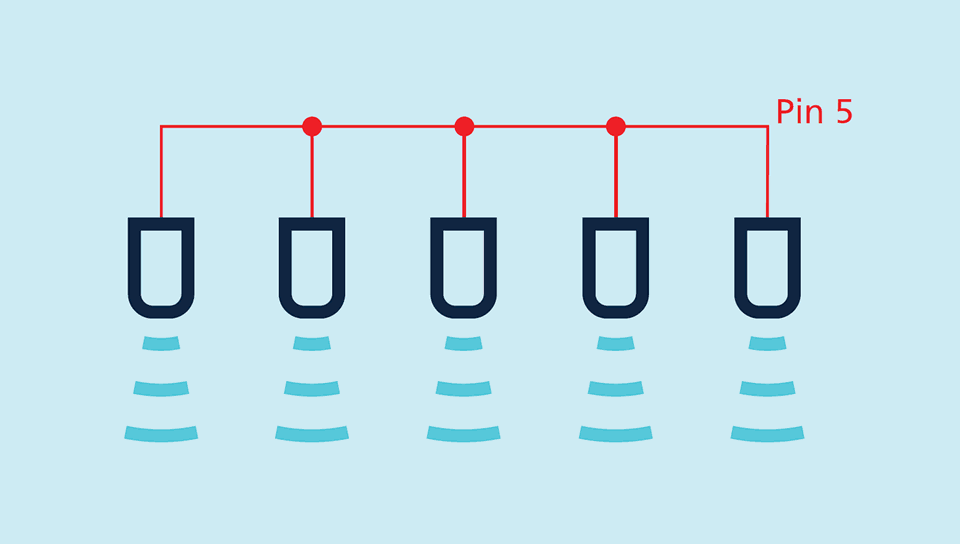
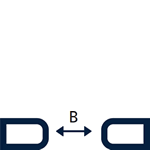
Si deux capteurs ou plus sont montés trop proches l'un de l'autre, ils peuvent s'influencer les uns les autres. Pour éviter cela, l'espacement de montage doit être suffisamment grand, ou bien les capteurs doivent être synchronisés les uns avec les autres. Le tableau suivant répertorie les distances minimales de montage entre les capteurs non synchronisés.
Montage minimales entre capteurs non synchronisés
| Operating range | 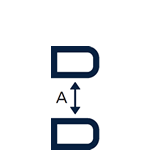 |
 |
|
 |
0.07 m | ≥ 0.25 m | ≥ 1.10 m |
 |
0.15 m | ≥ 0.25 m | ≥ 1.30 m |
 |
0.24 m | ≥ 0.25 m | ≥ 1.40 m |
 |
0.25 m | ≥ 0.35 m | ≥ 2.50 m |
 |
0.35 m | ≥ 0.40 m | ≥ 2.50 m |
 |
0.7 m | ≥ 0.70 m | ≥ 4.00 m |
 |
1.0 m | ≥ 0.70 m | ≥ 4.00 m |
 |
1.3 m | ≥ 1.10 m | ≥ 8.00 m |
 |
3.4 m | ≥ 2.00 m | ≥ 18.00 m |
 |
6.0 m | ≥ 4.00 m | ≥ 30.00 m |